【研究成果展示】手道具の3Dアーカイブ [協力 : 工芸科彫金研究室]
3Dデジタルアーカイブに関するプロジェクトの成果展示を行いました。
このプロジェクトは彫金研究室からお借りした手道具類を対象に3Dスキャンを実施し、
手道具をデジタルアーカイブするとともに、3Dスキャンの技術向上を目的としています。
展示概要
手道具の3Dアーカイブ
協力 : 工芸科彫金研究室
東京藝術大学芸術情報センター
※スペースの都合により会期を3回に分けて実施
会期1:2025/07/08 – 07/10 AMCラボ
会期2:2025/07/14 – 07/22 AMCラボ
会期3:2025/07/23 – 08/01 本部棟1階
プロジェクトの背景と目的
東京藝術大学が保有する芸術資源には、作品や文化財だけでなく、
長い歴史の中で培われた制作技術や、それを支える手道具も含まれています。
文化財や造形作品に対する3Dアーカイブの取り組みが進められる一方で、
制作過程で用いられる手道具の記録は、これまで十分には進められていないのが現状です。
本プロジェクトでは、精密な3Dスキャナを用いて手道具のデジタルアーカイブを実施しました。
道具の中には、既製品をもとに使用者が独自に加工や調整を施した道具もあり、それらには個々の技術や身体性が反映されています。
これらの記録は単なる物理的形状の保存にとどまらず、手道具に内在する知識や技術の継承にもつながると考えられます。
得られた3Dデータは、以下のような多方面での活用が想定されます。
- 教育における教材・資料としての活用
- 制作技術および制作環境の記録資源としての利用
- 3DプリントやAR・VRを用いた体験型教材への展開
- 技術的および文化的価値の継承支援
また、3Dスキャンを行う過程で明らかになった技術的課題を整理し、それに適した手法を検討・確立することも、本プロジェクトの重要な目的の一つです。
プロジェクト概要
工芸科彫金研究室にて所蔵または現在も使用されている11点の手道具類を対象に、
高精度3Dスキャナ(Artec Micro II)を用いたデジタルアーカイブを実施しました。

スキャンプロセスと技術的手法
対象となった手道具は、素材・形状・可動性などが多様であり、それぞれの特性に応じた工夫が求められました。
特に金属光沢による反射、細部の複雑な形状、可動部の有無はスキャン精度に大きな影響を及ぼす要因となりました。
これらの課題に対して、以下のような技術的アプローチを試みました。
- 反射軽減のための3Dスキャン用現像スプレー(エイサブ)の塗布
- 対象物の形状に応じた固定治具の作成
- 可動部は開閉状態をそれぞれスキャン→差分を考慮した統合データの再構成
- 照明条件やスキャニングパス(スキャン経路)の最適化
- 自動位置合わせの補正および手動での位置調整
汎用的な手法では正確な記録が困難であり、それぞれの道具に適したスキャンプロセスの検討が不可欠であることが確認できました。
展望と課題
本プロジェクトでは、使用者による加工の痕跡を含めて道具を記録することで、制作に伴う身体的・経験的知識を可視化し、継承可能な形で共有するための手がかりを得ました。
今後は、より多様なオブジェクトへの応用に加え、スキャン技術の蓄積・体系化を進めることで、再現性のあるスキャン手法を確立していくことが課題となります。
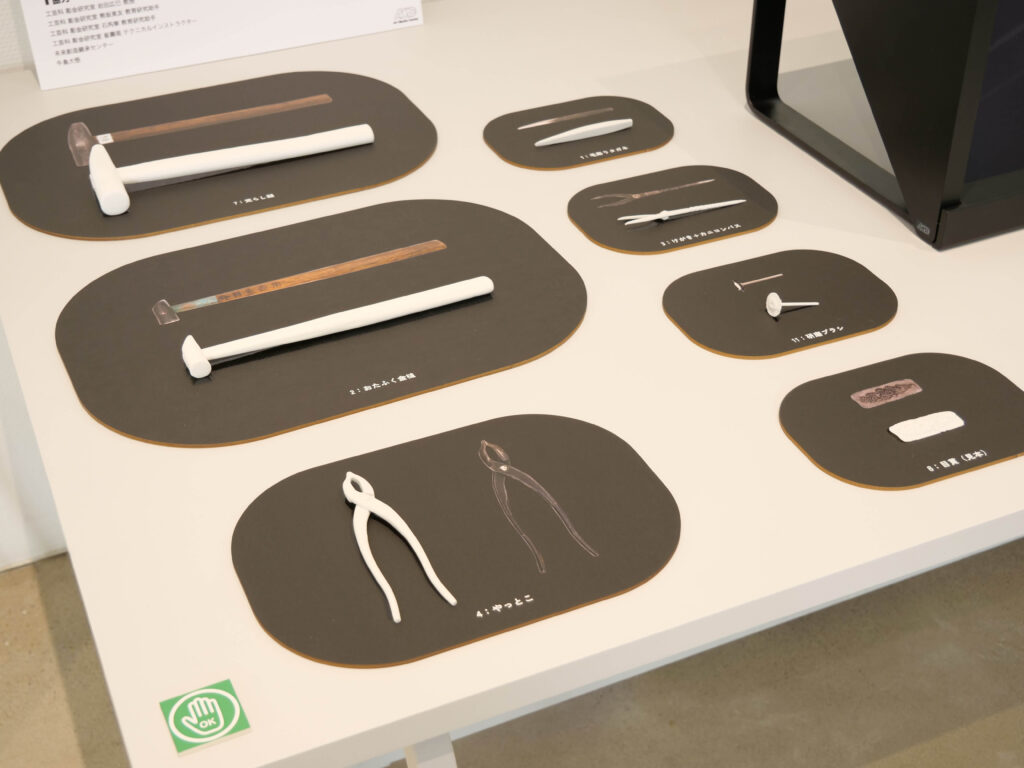
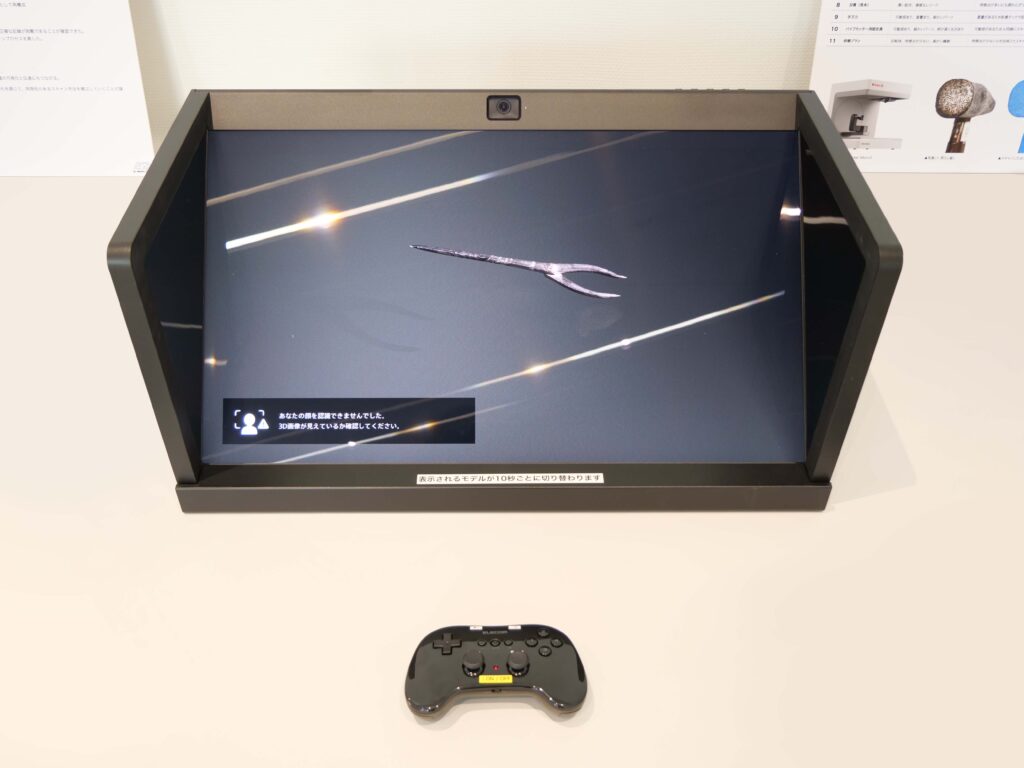
展示内容
・手道具の複製品 11点 (実物大に3Dプリントした模型)
・空間再現ディスプレイ「ELF-SR2」による3Dビュー (ゲームコントローラにより操作可能)

スキャンした手道具類一覧

| 名称 | 形状・素材の特徴 | スキャンプロセスの工夫 | |
|---|---|---|---|
| 1 | 毛彫りタガネ | 端部に光沢あり | エイサブを塗布して反射を抑制。 |
| 2 | オタフク鎚 | 規定サイズを超える長さ | 手前にはみ出すように設置し、スキャナ本体に接触しない範囲で回転させてスキャン。 それを複数回行い、データを統合。 |
| 3 | けがき+カニコンパス | 複雑な形状、端部に光沢あり | エイサブを塗布。 |
| 4 | やっとこ | 可動部あり | 開閉状態をそれぞれスキャンし、差分を考慮しながら位置合わせをして統合。 |
| 5 | 木製ホールドハンドバイス | 可動部あり、可動部の隙間に陰影あり | 影による形状欠損を避けるため、開いた状態も撮影し統合。 |
| 6 | 金鎚の頭 | 重量あり、光沢あり | エイサブを塗布。重量があるため粘着タックで固定し、水平回転でスキャン。 |
| 7 | 荒らし鎚 | 規定サイズを超える長さ、打面に模様あり | 2 同様に設置。重量があるため水平回転のみ。頭部にエイサブ塗布。 柄が長く特徴点が少ないため、位置合わせに苦慮。 |
| 8 | 目貫(見本) | 薄い板状、複雑なレリーフ | 特徴点が多いにも関わらずエラーが生じたため、手動による位置合わせを要した。 |
| 9 | 手万力 | 可動部あり、重量あり、細かいパーツ | 重量があるため粘着タックで固定し、水平回転でスキャン。 |
| 10 | パイプ・線材切断治具 | 可動部あり、細かいパーツ、柄が黒く光沢あり | 可動部があるため 4 同様にスキャン。柄のみエイサブを塗布。 |
| 11 | リューター用軸付きブラシ | 回転体、特徴点が少ない、細かい繊維 | 特徴点が少ないため治具ごとスキャンし位置合わせ。最後に治具部分を削除。 |
担当:沼倉真理
補佐:川田祐太郎、岩崎伸治
協力:工芸科 彫金研究室 岩田広己 教授
工芸科 彫金研究室 熊坂美友 教育研究助手
工芸科 彫金研究室 石芮寧 教育研究助手
工芸科 彫金研究室 崔壽現 テクニカルインストラクター
未来創造継承センター
牛島大悟